 发布时间:2020年11月16日 08:31
发布时间:2020年11月16日 08:31 点击:
点击:应用领域:计算机视觉定位、移动机器人导航技术。
成果简介:本成果所研究的内容是基于ArlUco码的AGV视觉定位与导航,主要研究如何利用相机和二维码实现移动机器人在三维空间中的实时定位与导航。木成果以ACGV为实验平台,在做好理论与软件方面的工作后,已在AGV上完成了初步实验,效果理想。
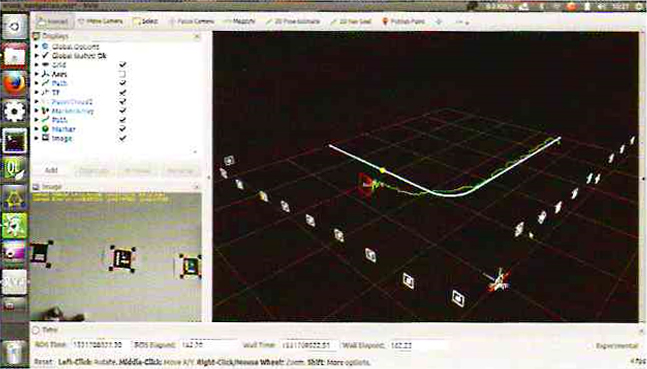
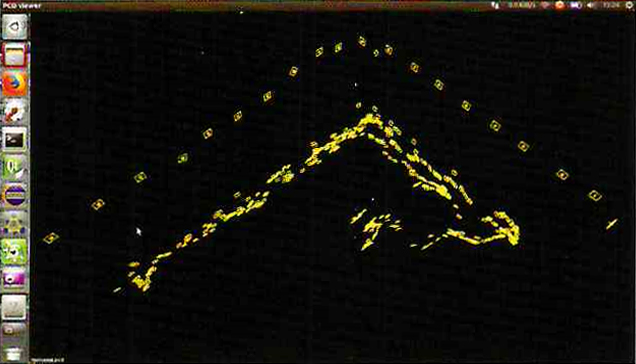
(1)通过在室内环境下任意张贴ArUco基准标识码,用视觉建图的方法构建出二维码在三维空间中的分布图,同时确定一个参考二维码坐标系作为世界坐标系,并得到所有二维码角点在世界坐标系下的三维坐标;
(2)根据室内所有二维码的分布图,机器人携带相机在看到任意一张二维码时便可估计出机器人当前在室内参考坐标系下的三维坐标与姿态;
(3)根据室内真实的物理环境,在有效规避障碍的前提下,利用计算机自动生成-条基于参考世界坐标系的三维路径;
(4)根据机器人的实时位姿数据和预先设计的路径数据,计算机器人当前位姿与日标位置的偏差,使其沿着预设路径到达目标点。
本成果与传统基于维码的视觉定位与导航方法相比,其优势在于:
(1)二维码粘贴随意,不需要人工测量和精确铺设,但尽量保证二维码表面平整;
(2)导航路径灵活,在有效规避障碍的前提下可规划任意曲线,且变更路径时不需对二维码做任何改变;
(3)该方法不仅适用地面移动机器人定位与导航,对无人机等空间移动设备同样适用。
经济效益与应用前景分析:本成果所提出的方法利用价格低廉的相机作为主要传感器,可实时精确获取移动机器人的三维空间坐标和姿态。该方法不仅成本较低,而且方便灵活、精准可靠,具有广泛的应用前景。
 友情链接:
友情链接:
 科技园区
科技园区 学校首页
学校首页 今天是:
今天是: 成果发布
成果发布
 当前位置:
当前位置: